Disaster
Standard Disaster
Robotics Challenge
- Plant Disaster Prevention Challenge
- Tunnel Disaster Response and Recovery
Challenge - Standard Disaster Robotics Challenge
Standard Disaster
Robotics
Challenge
Assessing standard performance levels
(e.g. mobility, sensing, information collection,
wireless communication, remote control on-site deployment, durability, etc.)
required in disaster prevention and responses
(Competition time for each team is listed in the description of the video.)
Outline
Assessing standard performance levels (e.g. mobility, sensing, information collection,
wireless communication, remote control on-site deployment, durability, etc.)
required in disaster prevention and responses.
Standard performance test methods (STM) for infrastructure disaster prevention and
response are developed here.
These STMs are complementary to the current NIST STMs for USAR (Urban Search and Rescue) and
EOD(Explosive Ordinance Disposal).
Robots
- Either remote controlled or autonomous robots are accepted. Robots must be controlled without being viewed directly by the operator.
- Aerial robots are not acceptable. Other types are allowed.
- Maximum weight 130kg, maximum size at start position within 1.2m x 1.2m.
- Only 1 robot is allowed.
Robot Operator
1 person
Competition Field
The basic components making up the competition field are 1.2m square pallets.
Competition Time
Prep 5 mins, task 15 mins, removal from field 10 mins - total 30 mins.
Extra points will be awarded for robots with environmental resistance. Waterproof +10% (preliminary review by video), explosion proof +10% (submit copy of certificate verifying resistance to explosions).
Task
 Task MAN1
Task MAN1
Negotiate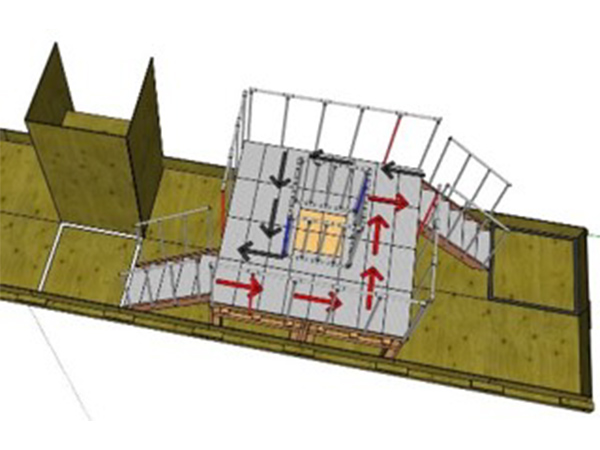 Task MOB1
Task MOB1
Catwalk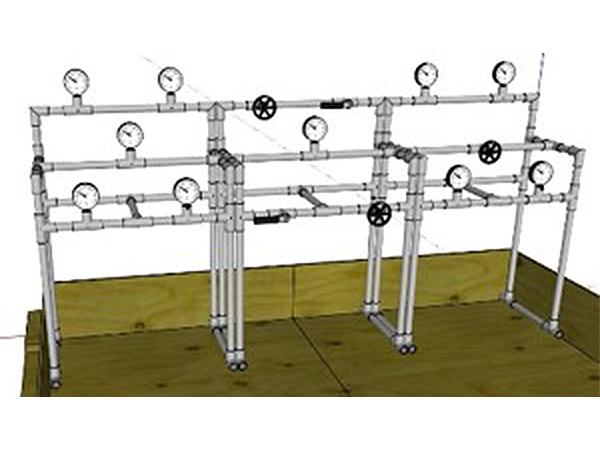 Task DEX1
Task DEX1
Meter / Valve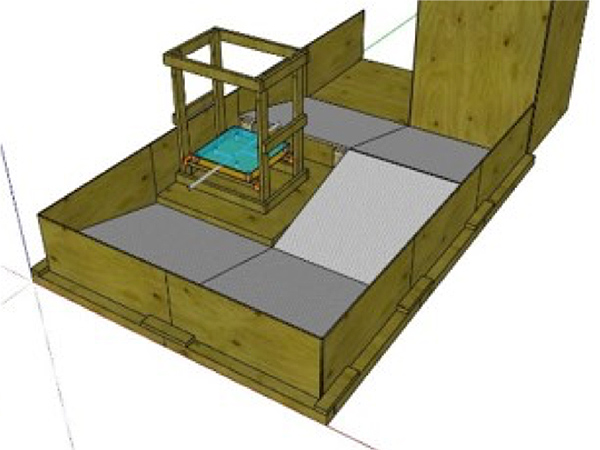 Task DEX2
Task DEX2
L-shaped Debris
on Uneven Ground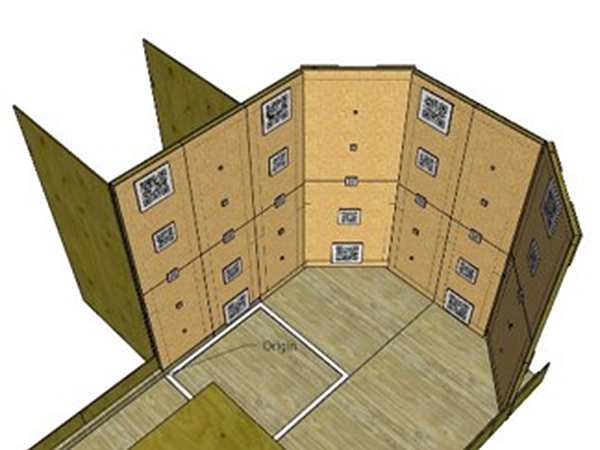 Task EXP1
Task EXP1
Large area
Inspection
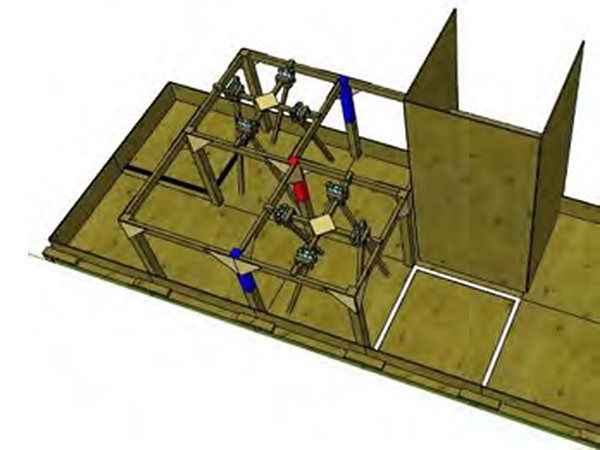
Task MAN1
Negotiate
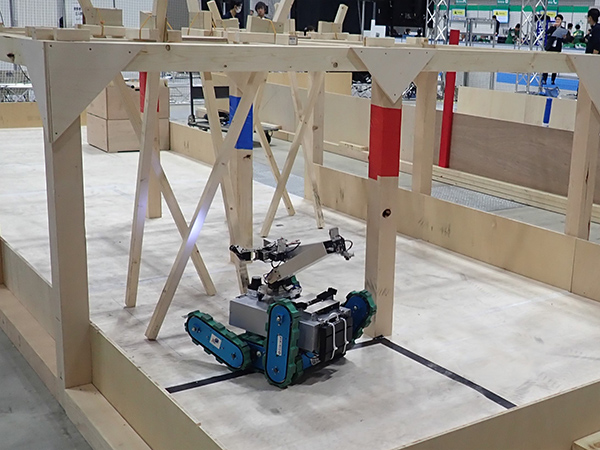
Move through a set of movable vertical and diagonal sticks by pushing through or avoiding them.
Challenges
Recognition of stick-shaped obstacles. Move through a narrow space with the assumption that the robot will come into contact with the surrounding environment (sticks).
Task MOB1
Catwalk
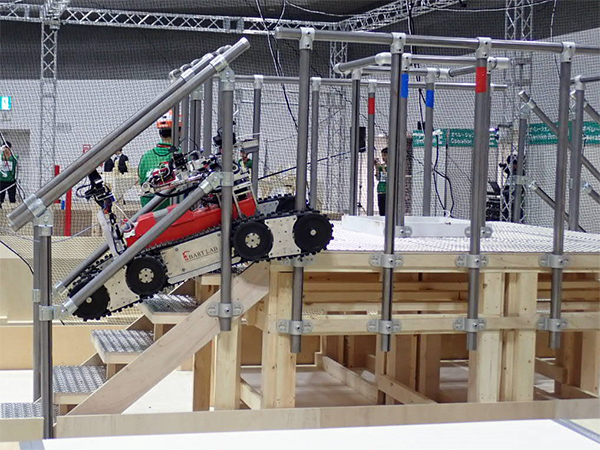
Traverse a catwalk (inspection deck) composed of a grating floor and skeleton staircase.
- Walkway: Width 600-1000mm, Rail: Height 0-1100mm
- Skeleton Staircase: Step 150-250 mm, Width 600-1000 mm, Incline 30-60°
- Rail: Height 0-1100mm
Challenges
Move quickly and accurately in an environment emulating a plant's walkway.
Task DEX1
Meter / Valve

Assesses the robot's ability to read meters and operate valves.
One part of the task is feedback-style, where a valve must be operated to set the meter to a specified reading. Meters and valves are set at heights of less than 2.2m. It is constructed from the following components.
- Meter: JIS B 7505-1 based on "Bourdon Pressure Gauge"
- Gate Valve: KITZ Corp. Class 125 Brass Gate Valve FR 1B (25A). Torque required to rotate 0.8Nm.
- Ball Valve: KITZ Corp. Type 600 Brass Ball Valve TK 1B(25A). Torque required to rotate 2.0Nm.
Challenges
Quickly and accurately operate multiple targets.
A feedback-style task linking surveillance and operations.
Task DEX2
L-shaped Debris on Uneven Ground
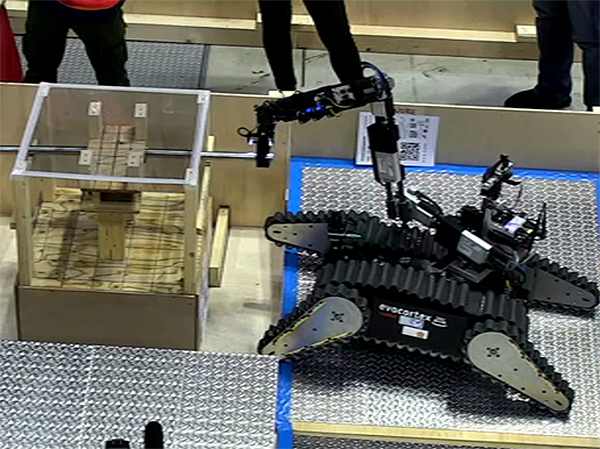
Assesses the ability to handle and move debris while on a surface that emulates a disaster site.
Challenges
Movement over uneven ground, and handle debris quickly and accurately.
Task EXP1
Large area Inspection

Assesses the ability to recognize targets* spread widely over flat or curved surfaces, and generate a map of these targets. Targets are placed at heights of less than 2.5m, over a an area of approx. 4m² to 40m².
*Please refer to the rule book for details of targets.
Challenges
Survey a large area quickly and accurately.
- Plant Disaster Prevention Challenge
- Tunnel Disaster Response and Recovery
Challenge - Standard Disaster Robotics Challenge