2018年10月17日 - 10月21日開催 World Robot Summit 2018 | 2020年8月・10月開催 World Robot Summit 2020
インフラ・災害対応
トンネル事故災害対応・復旧チャレンジ
概要
トンネル災害における情報収集、緊急対応(人命救助、車両排除等)。
ルール設定等詳細情報は競技参加者の決定後、通知します。
タスク1
障害の走破
タスク2
車両調査
タスク3
道具を使用した車両内の
調査と救助
タスク4
経路の確保
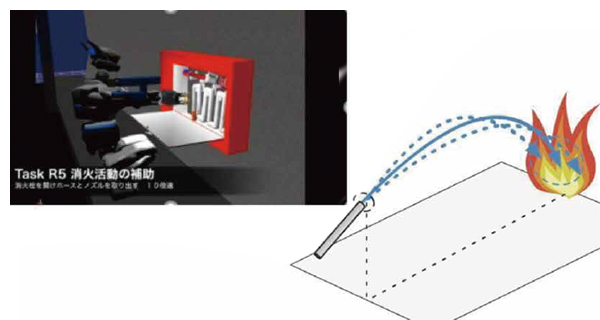
タスク5
消火作業
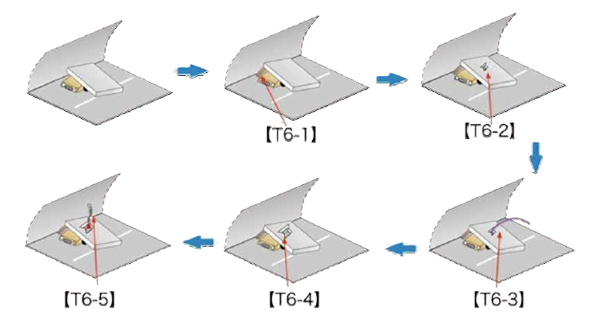
タスク6
ショアリング、ブリーチング
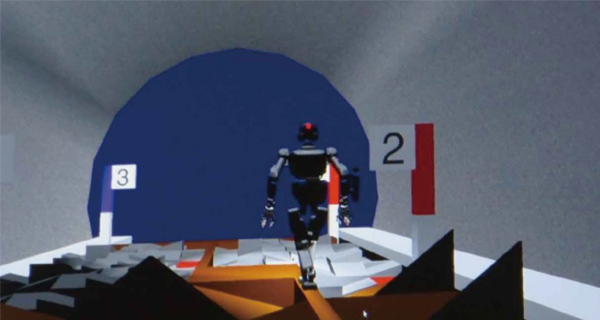
タスク1
障害の走破
不整地、狭隘空間を移動します。
チャレンジ
重作業用ロボットが障害物を取り扱う際の機動性
採点
実用レベルのスピードと正確さ
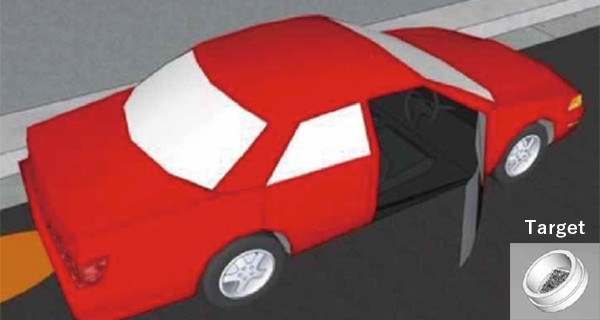
タスク2
車両調査
車両の内部、外部、および周辺(トンネル)を調査します。
チャレンジ
狭く入り組んだ暗い場所の視認点検調査
採点
実用レベルのスピードと正確さ
タスク3
道具を使用した車両内の調査と救助
道具を使用した車両内の調査と要救助者を車両から救助します。
チャレンジ
人間に対する道具の使用。人体の扱い。
採点
実用レベルのスピードと正確さ
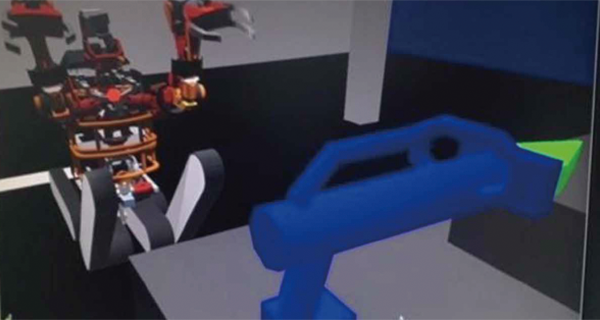
タスク4
経路の確保
指定の経路内にある障害物を押し出し、引き抜き、移動させます。
チャレンジ
重心がわからないL字型の障害物の取り扱い
採点
実用レベルのスピードと正確さ
タスク5
消火作業
トンネル内の消火栓を使用して消火活動を行います。
チャレンジ
様々な消火タスク能力(柔軟物体としてのホースの取り扱い、ノズルとホースの接続など)、放水の反動力への対応能力。
採点
実用レベルのスピードと正確さ
タスク6
ショアリング、ブリーチング
ガレキの下敷きとなっている車両の内部を調査し、車両上部から安定化作業と穿孔作業をして車両内の要救助者を救助します。
チャレンジ
広域にわたる災害救助(大きな反動力のあるツールを人間に対して使用する、狭いスペースでの捜索、人体の取り扱い)
採点
実用レベルのスピードと正確さ
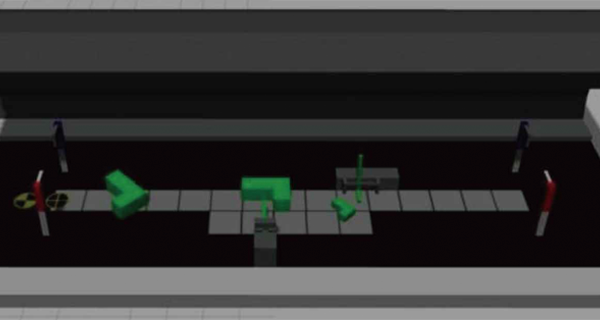
トンネル事故災害対応・復旧チャレンジ競技は、Choreonoid上の仮想環境におけるシミュレーションとして実施されます。 競技に対応したChoreonoidの情報については、こちらをご参照ください。
詳細はこちら※ロボットは競技委員会が選定したプラットフォームロボット、または独自に製作したロボットとなります。

