2018年10月17日 - 10月21日開催 World Robot Summit 2018 | 2020年8月・10月開催 World Robot Summit 2020
インフラ・災害対応
プラント災害予防チャレンジ
概要
定められた基準に従ったインフラの点検またはメンテナンスをします(例:バルブの開閉)。
ルール設定等詳細情報は競技参加者の決定後、通知します。
タスク1
日常点検/設備調整
タスク2
異常検知
タスク3
設備診断
タスク4
災害対応
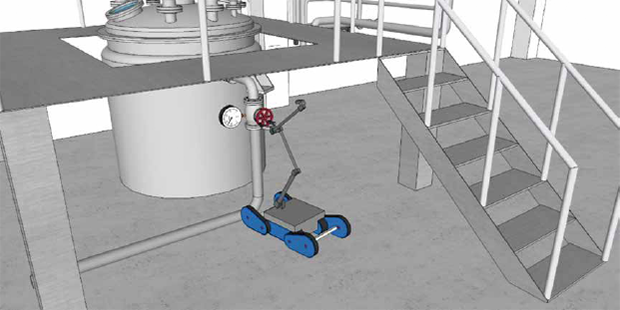
タスク1
日常点検/設備調整
指定された場所にあるメーターなどの数値をカメラにより視認し、指定された場所にあるバルブなどを調整します。
タスク条件
- 移動
- 通路(部分的に狭くなっている)、階段、パイプ。素材はコンクリートなど。
- センシング/操作
- 対象は事前に特定されたメーターやバルブ等。ロボットはプレインストールされたセンサーや両手を使ってもよい。
- 環境
- 様々な設備を備えた、通常の状態のプラント
チャレンジ
フィードバックタイプのオペレーション(メーターを読んでバルブを調整する)
採点
実用可能なスピードと正確性
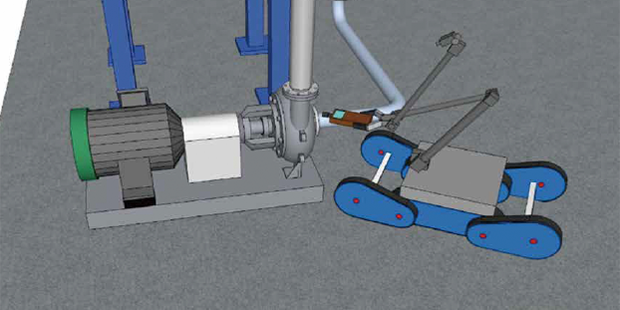
タスク2
異常検知
発生場所が不明なパイプラインの異常音・振動を測定し、結果を報告します。
タスク条件
- 移動
- タスク1と同じ
- センシング/操作
- 異常が起きている位置は特定されていない。位置は競技委員会によって特定される。ロボットはプレインストールされたデバイス(既製品、または自作品)を使用してもいい。
- 環境
- タスク1と同じ
チャレンジ
異常が検知される位置は不明。障害測定デバイスのロボットとの融合。
採点
実用可能なスピードと正確性
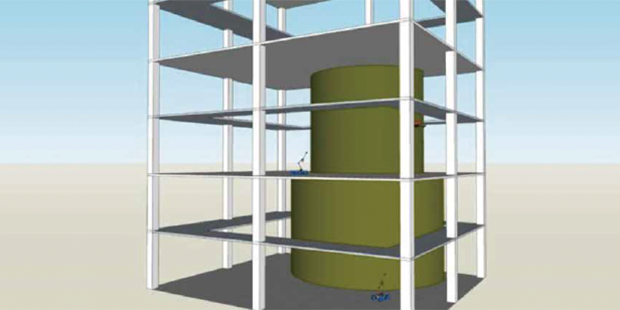
タスク3
設備診断
タンクや煙突などの大規模構造物を対象とし、設備の健全性を診断します。
タスク条件
- 移動
- タスク1と同じ
- センシング/操作
- 診断対象は大きな構造物。診断対象は競技委員会によって事前に特定される。ロボットはプレインストールされたデバイス(既製品、または自作品)を使用してもいい。
- 環境
- タスク1と同じ
チャレンジ
広範囲にわたる操作。診断デバイスのロボットとの融合。
採点
実用可能なスピードと正確性
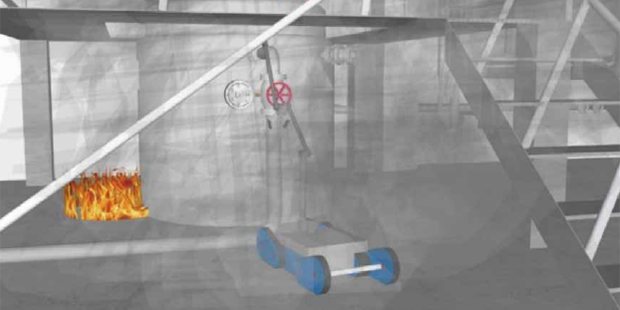
タスク4
災害対応
点検中に発生した事故への対応。事故原因の調査・対応を環境外乱(例:煙、爆発によるガレキの散乱)の下で行います。
タスク条件
- 移動
- タスク1 + 瓦礫
- センシング/操作
- 操作対象タスク1とタスク2と同様。また災害対応で使われたもの(消火栓)。
- 環境
- 災害発生時の状態(煙、水、油、瓦礫などで周囲の状況がよくわからない状態)
チャレンジ
不確定な状況で多岐にわたる操作
採点
実用化できるレベルのスピードと正確性