2018年10月17日 - 10月21日開催 World Robot Summit 2018 | 2020年8月・10月開催 World Robot Summit 2020
ものづくり
製品組立チャレンジ
ルール詳細は今後更新予定です。随時お知らせいたします。(最新版:10月10日更新)
ロボット貸し出しについての詳細を公開いたしました。
ロボット貸し出しリストをご確認ください。
貸し出しを希望するチームはエントリーシートに希望するロボットを記入してください。
概要
工業製品等の組立に必要な技術要素を含んだモデル製品を組み立てるための
ロボットシステムを迅速にかつ無駄なく立ち上げて、
そのモデル製品を素早く正確に組み立てることを競います。
WRS2018製品組立チャレンジ
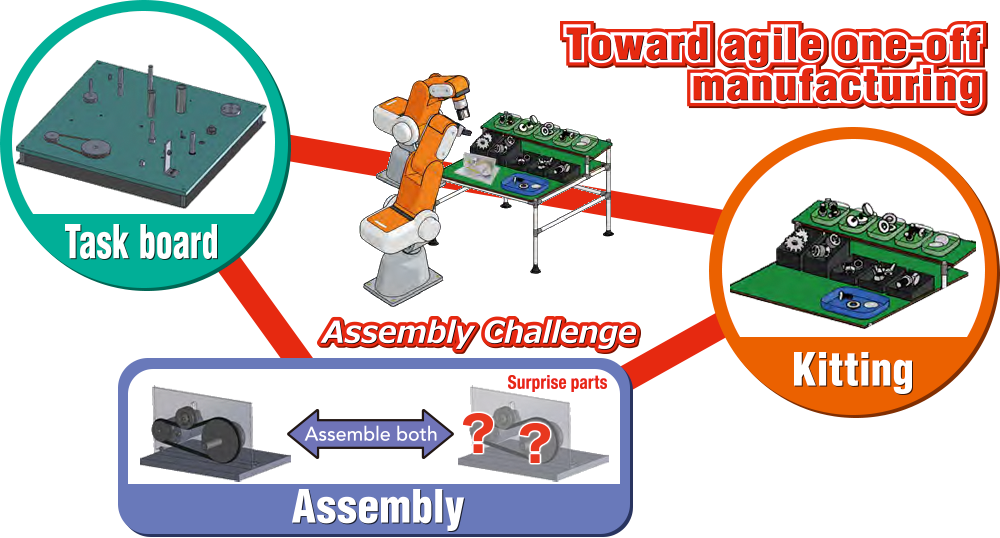
2018年の競技では、2017年のトライアルタスク(IROS 2017の2nd Robotic Grasping and Manipulation Competitionの中で実施)の対象製品であったギヤユニットよりもさらに複雑なモデル製品として、ベルトドライブユニットを組み立てます。
「迅速な一品ものづくり」を目指すため、2018年の競技では事前に告知した製品の組み立てだけでなく、部品の一部を競技の直前になって初めて開示する「サプライズパーツ」に置き換えた製品も組み立てることが求められます。
またベルトドライブユニット組立競技に先立って、組立に必要な要素作業の能力を評価する「タスクボード」と組立作業の前に必要なタスクである「キッティング」を行います。
各タスクの詳細は下記を参照ください。
1. タスクボード
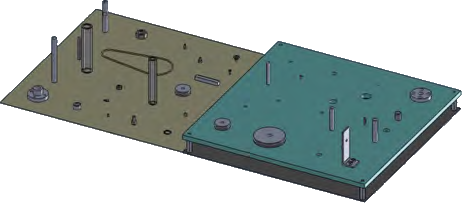
ベルトドライブユニット組立に必要な要素作業を行います。このタスクでは、配置マットの上に置かれた部品をタスクボードの上の指定された位置に組み付けます。
タスクボードにおける技術的な課題は下記が挙げられます。
- 部品の認識
- ペグ挿入とねじ締め
- 柔軟部品(ベルト)
- ユニバーサルハンド
2. キッティング
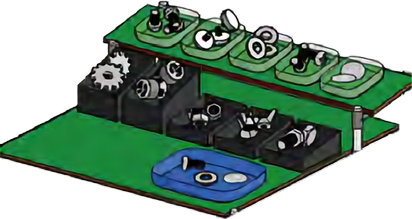
ベルトドライブユニット組立の準備タスクにあたるキッティングを行います。このタスクでは、容器の中から必要な部品をピックアップし、キッティングトレイの上に置きます。
キッティングにおける技術的な課題は下記が挙げられます。
- 部品の認識
- バラ積みピッキング
- ユニバーサルハンド
3. 組立
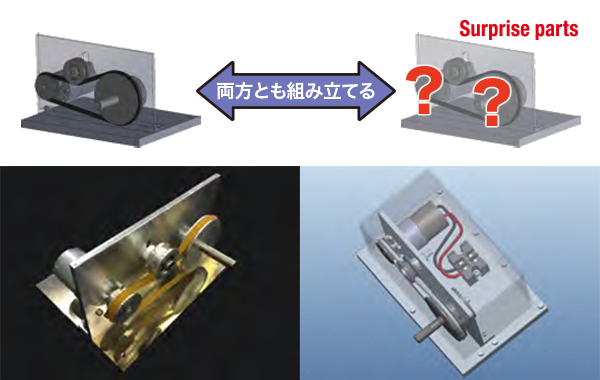
ベルトドライブユニット組み立てとシステムの段取り替えを行います。このタスクでは、キッティングトレイの上に準備した部品を使ってベルトドライブユニットの組み立てを行います。また、新たな生産要求への対応として、事前に告知した部品とは異なる仕様の部品(サプライズパーツ)を組み立てるために迅速かつ効率的な段取り替えも行います。
製品組立における技術的な課題は下記が挙げられます。
- クリアランスの小さい部品のはめ合い
- 部品の認識
- 冶具レスでの組立
- 柔軟部品(ベルト)
- 3部品同時組立
- 微細部品
- サプライズ部品への迅速な対応



