インフラ・災害対応
災害対応標準性能評価
チャレンジ
- プラント災害予防チャレンジ
- トンネル事故災害対応・
復旧チャレンジ - 災害対応標準性能評価
チャレンジ
Standard Disaster
Robotics
Challenge災害対応標準性能評価チャレンジ
災害予防・対応で必要となる標準性能評価
(移動能力、センシング能力、情報収集能力、無線通信能力、遠隔操作性能、現場展開能力、耐久性)
(動画の概要欄に各チームの競技時間を記載しております。)
概要
災害予防・対応で必要となる標準性能レベルの評価をします。
(例:移動能力、センシング、情報収集、無線通信、遠隔操作、現場展開、耐久性、など)
インフラ災害予防・対応のための標準性能評価法(STM)をここで開発し、
都市における捜索と救助および爆発物処理のための現在のNISTのSTMと相互に補完し合うものとなります。
ロボット
- 遠隔操縦型・自律型いずれでも可。ロボットの直接目視はできない。
- 飛行型は不可。それ以外は形態は問わず。
- 重さは130kg以下、大きさは競技スタート時に一辺1.2mの立方体に入る事。
- 台数は1台。
ロボット操縦者
1名
競技フィールド
1.2m角のパレットを基本構成要素とし、競技フィールドを構成する。
競技時間
準備5分、タスク実施15分,撤去10分の合計30分を基本とする。
耐環境性を有するロボットは加点される。加点は防水性(ビデオによる事前審査)10%、防爆性(防爆検定証のコピーの提出)10%。
タスク
 タスク MAN1
タスク MAN1
ネゴシエート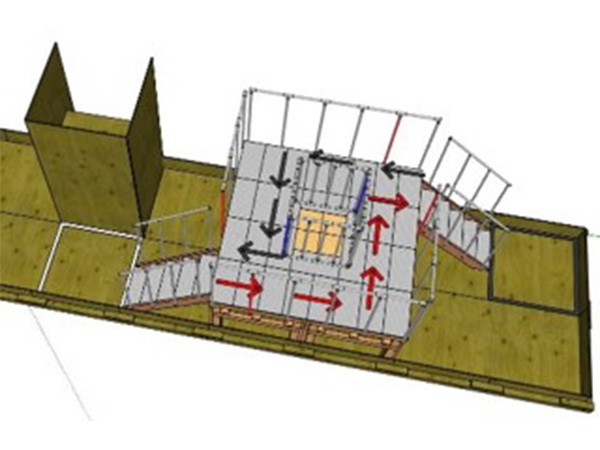 タスク MOB1
タスク MOB1
キャットウォーク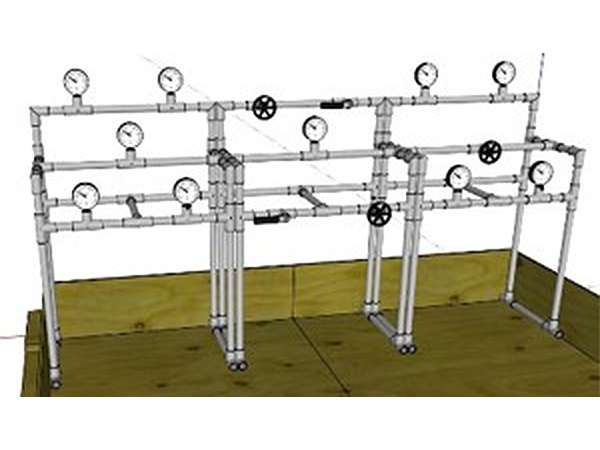 タスク DEX1
タスク DEX1
メーター/バルブ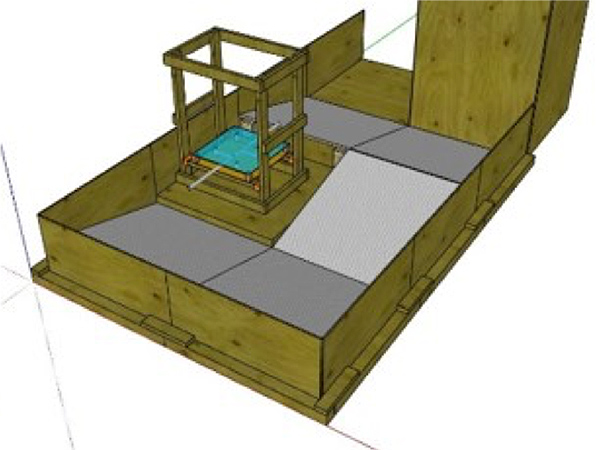 タスク DEX2
タスク DEX2
不整地上での
L字障害物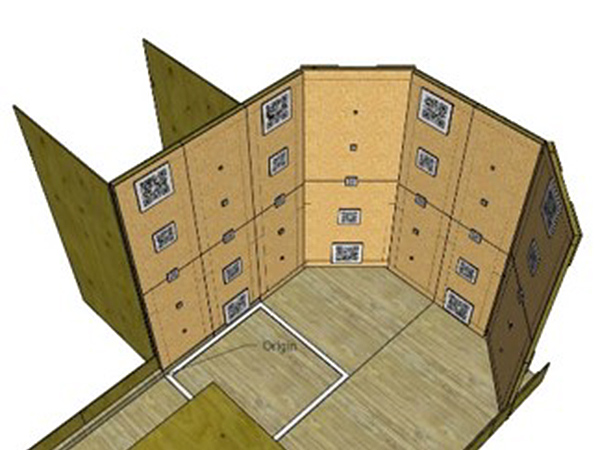 タスク EXP1
タスク EXP1
広い面積の検査
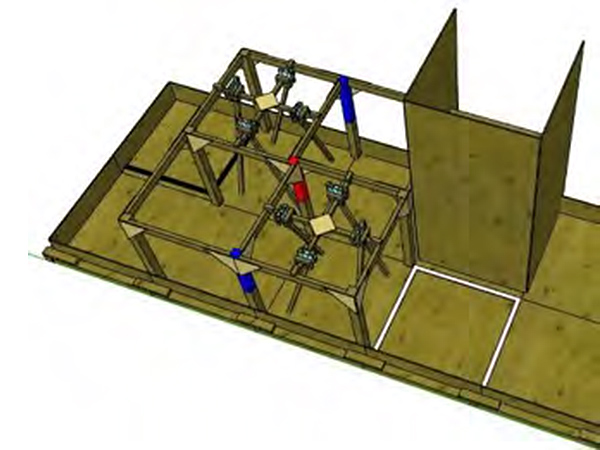
タスク MAN1
ネゴシエート
災害現場を想定した棒により制限された狭い場所を移動する能力を評価する。
チャレンジ
棒状障害物の認識。周囲環境(棒)との接触を前提とした狭い場所での移動。
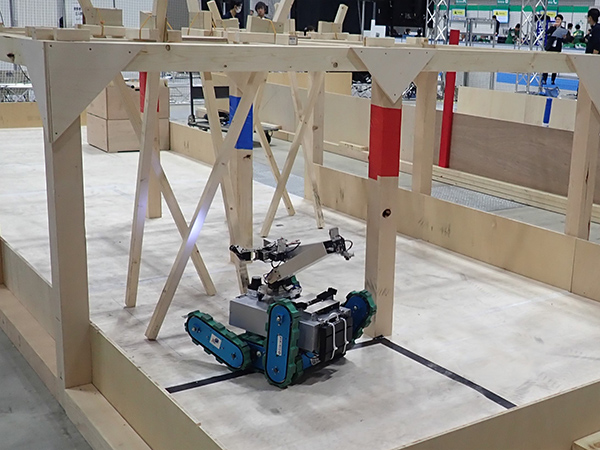
タスク MOB1
キャットウォーク

プラントを想定した床材を床面とする通路とスケルトン階段で構成されたキャットウォーク(点検用デッキ)を移動する能力を評価する。
- 通路:幅600-1000mm、手すり:高さ0-1100mm
- スケルトン階段:踏面 150-250 mm、幅 600-1000 mm、勾配 30-60 deg
- 手すり:高さ0-1100mm
チャレンジ
プラントの通路を想定した環境での早く正確な移動。
タスク DEX1
メーター/バルブ
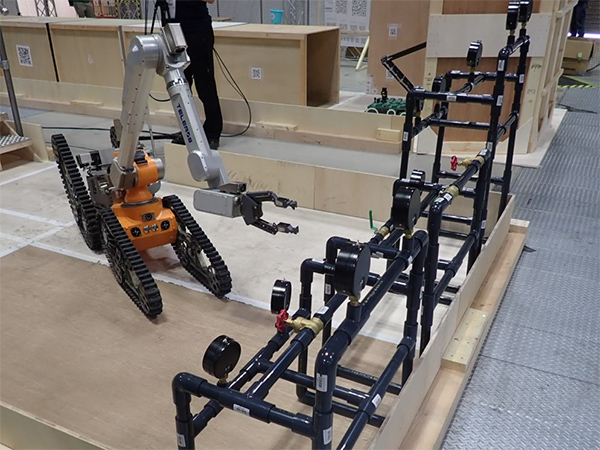
メーターの値を読む、バルブを操作する能力を評価する。
一部のタスクはメーターの値が指定値となるようバルブを調整するフィードバック型である。メーター、バルブは高さ2.2m以下に配置される。構成要素は下記である。
- メーター:JIS B 7505-1準拠ブルドン管圧力計
- ゲートバルブ:KITZ社製Class 125 Brass Gate Valve FR 1B(25A)。開閉必要トルク約0.8Nm.
- ボールバルブ:KITZ社製Type 600 Brass Ball Valve TK 1B(25A)。開閉必要トルク約2.0Nm.
チャレンジ
複数の対象の早く正確な操作。観察と操作が連動するフィードバック型のタスク。
タスク DEX2
不整地上でのL字障害物
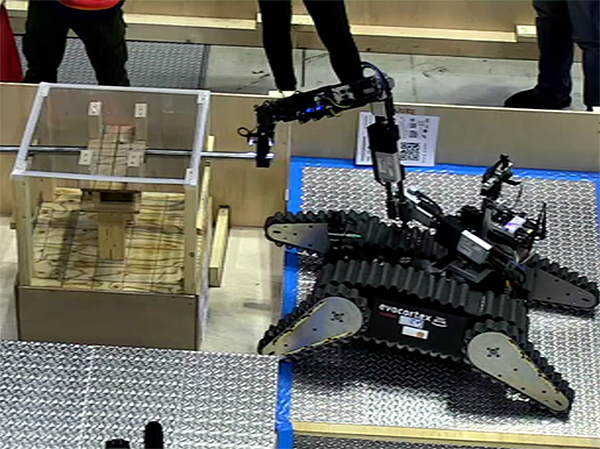
災害時を想定した路面での障害物の移動操作能力を評価する。
チャレンジ
不整地での移動と障害物の操作の早く正確な実施。
タスク EXP1
広い面積の検査

平面上や円柱上などに広く分布しているターゲット*を認識し、その地図を作成する能力を評価する。ターゲットの分布範囲は高さ2.5m以下で面積は4m²~40m²程度である。
チャレンジ
広い面積の早く正確な検査。
- プラント災害予防チャレンジ
- トンネル事故災害対応・
復旧チャレンジ - 災害対応標準性能評価
チャレンジ